












My name is Petar Kormushev. I am Director of the Robot Intelligence Lab at Imperial College London, UK. I am also a Senior Lecturer (equiv. to: Associate Professor) in Robotics at the Dyson School of Design Engineering.
Previously, I was a Visiting Senior Research Fellow at King’s College London. Before that, I was Research Team Leader at the Advanced Robotics department of the Italian Institute of Technology (IIT) in Genoa, Italy.
I do research in robotics and machine learning. My research focus is on reinforcement learning algorithms and their application to autonomous robots. My long-term goal is to create robots that can learn by themselves and adapt to dynamic environments. You can find details about my Research and Publications, as well as watch Videos from my research experiments with robots.
At IIT, I was leading the Learning and Interaction Lab of the Advanced Robotics department. We continue to develop machine learning algorithms and apply them to robots like the compliant humanoid robot COMAN, the iCub humanoid robot, the Barrett WAM arm manipulator robot, and the Fujitsu HOAP-2 small humanoid robot. This was my page at IIT.
In 2009, I obtained my PhD degree from Tokyo Institute of Technology (Japan), where I was doing research in computational intelligence under the supervision of Prof. Kaoru Hirota. My PhD thesis was dedicated to methods for speeding up the reinforcement learning process. I was also supervised by Visiting Prof. Kohei Nomoto from Mitsubishi Electric Corp. and Visiting Prof. Shigeaki Sakurai from Toshiba Corp.
In 2005, I received my MSc degree in Artificial Intelligence from Sofia University, at the Faculty of Mathematics and Informatics. In 2006, shortly before moving to Japan, I successfully defended my second MSc degree in Bio- and Medical Informatics.
I have had the chance to collaborate with many excellent researchers in robotics and machine learning, including Dr. Sylvain Calinon and Dr. Nikos Tsagarakis from IIT, Prof. Dragomir N. Nenchev from Tokyo City University, Assoc. Prof. Gennady Agre from Bulgarian Academy of Sciences, and Dr. Barkan Ugurlu from Toyota Technological Institute. I am deeply grateful to my university lecturer Assoc. Prof. Maria Nisheva, for inspiring me to pursue studies in artificial intelligence.
In addition to my scientific research, I have more than 7 years of working experience. In 2008, I worked at Google Japan for 3 months as a software engineer in the Search Quality team. I created a prototype of a new search query categorization system (which I called Google Genus) using machine learning algorithms.
Thanks for visiting my website, I wish you pleasant surfing!
— Petar
Open positions in my team
Senior Lecturer position in Robotics and Physical Computing @ Imperial College London, 2016
Post-doc positions at Imperial College London for 2016
PhD position in Design Engineering for 2016
PhD position in Robotics and Machine Learning for 2016
PhD scholarships at Imperial College London for 2016
UROP position (Undergraduate Research Opportunities Programme) at Imperial College London for 2016
PhD positions in Robotics and Machine Learning for 2016
PhD positions in Robotics and Machine Learning for 2015
PhD positions in Robotics and Machine Learning for 2014
Post-doc position in Machine Learning for Robotics, May 2013
Post-Doc positions in Robotics at IIT for 2012
PhD positions in Robotics at IIT for 2012
Moving to Imperial College London!
I am glad to announce that I will be moving to Imperial College London starting from September 2015!
![]()
My new position will be Lecturer in Robotics and Computing at the Dyson School of Design Engineering.
This is my new page at Imperial.
I will also continue supervising PhD students at the Robot Learning and Interaction Lab which I was leading until now at Istituto Italiano di Tecnologia (IIT).

Visiting Researcher at KCL
Since August 2014 I am a Visiting Senior Research Fellow at KCL (King’s College London). I am working with the groups of Prof. Kaspar Althoefer and Prof. Maria Fox.
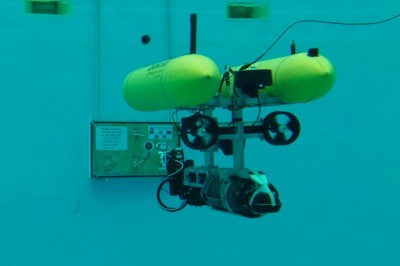
We are also collaborating on two EU FP7 projects (PANDORA and STIFF-FLOP) on the topics of persistent autonomy for underwater vehicles and learning for robot-assisted surgery.
Special Issue on Humanoid Robotics
I am co-editing a special Issue on Humanoid Robotics for the Advanced Robotics journal of RSJ. The submission deadline for papers is: April 14, 2014
More information about this special issue

With the President of Bulgaria, Mr. Rosen Plevneliev
I received the 2013 John Atanasoff award by the President of Bulgaria!
“John Atanasoff” Award, 2013
Awarded by the President of Bulgaria for scientific excellence and contributions to the development of Information and Communications Technologies (ICT) in Bulgaria and abroad. The award bears the name of Prof. John Atanasoff (who is of Bulgarian descent) – the inventor of the first electronic digital computer.

In 2012, I was appointed as a co-chair of the prestigious IEEE RAS Technical Committee on Robot Learning!
“After three very successful years for the Technical Committee on Robot Learning, the founding chairs Jan Peters, Jun Morimoto, Russ Tedrake and Nicholas Roy are stepping down as chairs of the committee. They will be replaced by Petar Kormushev, Edwin Olson, Ashutosh Saxena, and Wataru Takano who have kindly agreed to take the reigns of the committee.”
 |
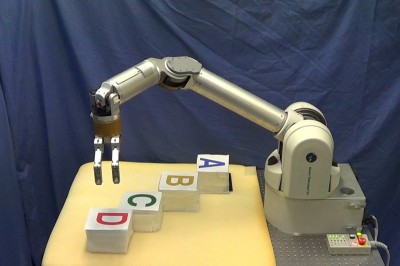
[Oct, 2013] “Visuospatial skill learning” – a novel approach for robot learning by demonstration (visual imitation learning). |
 |
[Aug, 2011] We presented our pizza-making robot at the Robotic Challenge event of AAAI’2011 in San Francisco!
See more info and photos here. |
 |
[Mar, 2011] New conference paper was accepted to IROS 2011!Kormushev, P., Ugurlu, B., Calinon, S., Tsagarakis, N., and Caldwell, D.G., “Bipedal Walking Energy Minimization by Reinforcement Learning”, IROS 2011. |
 |
[Aug, 2010] My new research experiment: Robot learns to clean a whiteboard! A free-standing Fujitsu HOAP-2 humanoid robot learns to clean a surface by upper-body kinesthetic teaching. Publication: P. Kormushev, D. Nenchev, S. Calinon, D. Caldwell, “Upper-body Kinesthetic Teaching of a Free-standing Humanoid Robot“, IEEE Intl. Conf. on Robotics and Automation (ICRA 2011), 2011. |
 |
[Nov, 2010] New journal paper! Kormushev, P., Calinon, S., and Caldwell, D.G., “Imitation learning of positional and force skills demonstrated via kinesthetic teaching and haptic input”, Advanced Robotics, 2011. |
 |
[Nov, 2010] New conference workshop paper! Kormushev, P., Calinon, S., and Caldwell, D.G., “Approaches for Learning Human-like Motor Skills which Require Variable Stiffness During Execution”, Workshop on Humanoid Robots Learning from Human Interaction (Humanoids 2010), 2010. |
 |
[May, 2010] My new research experiment: Robot archer! An iCub humanoid robot learns the skill of archery: it learns to aim and shoot arrows at the center of the target. Check it in the Videos section.
The paper publication: “Learning the skill of archery by a humanoid robot iCub”, IEEE Intl. Conf. on Humanoid Robots (Humanoids 2010), pp. 417-423, 2010. |
 |
[Jan, 2010] My new research experiment: Pancake flipping robot! A Barrett WAM robot learns how to flip pancakes by itself, trying to imitate a demonstration done by a human teacher.
Watch it in the Videos section. |
NEWS
Senior Lecturer position in Robotics and Physical Computing @ Imperial College London, 2016
![]()
The newly established Dyson School of Design Engineering at Imperial College London is currently recruiting for a Senior Lecturer vacancy with expertise in Robotics and Physical Computing and is looking for highly skilled, enthusiastic and well-motivated applicants wishing to make a career in one of the world’s leading teaching and research institutions.
The Dyson School of Design Engineering was launched in July 2014, providing leading edge design engineering undergraduate and postgraduate education and research. The School offers a new four-year MEng undergraduate programme in Design Engineering, launched in October 2015, which represents a rigorous approach to design engineering, creativity, commerce and enterprise appropriate to 21st century industry. In addition the School offers the established two double-masters programmes in Innovation Design Engineering (IDE) and Global Innovation Design (GID), run jointly with the Royal College of Art.
Applications are invited from individuals with a strong academic record (including a relevant PhD or equivalent) in a relevant engineering field (e.g. mechanical, electrical, software or control engineering), or a related field to robotics, computing, manufacturing, intelligent systems, industrial design, or innovation design engineering. Where relevant, experience in a multi- disciplinary context would be desirable. Applicants must have a track record of: high quality research, demonstrated by recent exceptional publications in internationally leading journals and conferences in robotics; and proven teaching excellence. Applicants are required to submit together with their applications their 4 best journal papers published since January 2010.
Successful candidates will be expected to contribute to undergraduate and postgraduate teaching and to play a leading role in developing the School’s research in the relevant area, building on and extending the School’s current activities.
Informal enquiries may be made to Dr Petar Kormushev (p.kormushev@imperial.ac.uk) and Prof. Peter Childs (p.childs@imperial.ac.uk) who is Head of the Dyson School of Design Engineering.
Job details
- Location: London, South Kensington
- Salary: £57,020 per annum
- Hours: Full Time
- Contract Type: Permanent
- Application deadline: 15th July 2016
How to apply
The preferred method of application is online via the website https://www.imperial.ac.uk/job-applicants/ (please select “Job Search/Academic” then the job title or vacancy reference number, EN20160173AM). Please complete and upload an application form as directed.
Further information is available at:
http://www.jobs.ac.uk/job/ANU718/senior-lecturer-with-expertise-in-robotics-and-physical-computing
Post-doc positions at Imperial College London
![]() There are outstanding opportunities for becoming a postdoctoral researcher (PDRA) at Imperial College London. Here I have listed five of the highly-competitive funding schemes.
There are outstanding opportunities for becoming a postdoctoral researcher (PDRA) at Imperial College London. Here I have listed five of the highly-competitive funding schemes.
I am available to mentor potential Post-Doc applicants on research topics related to robotics and machine learning. Interested candidates should contact me by e-mail before submitting their application.
Imperial College JRF (Junior Research Fellowship)
http://www.imperial.ac.uk/junior-research-fellowships/
- A competitive salary
- Research and travel expenses of up to £45,000
- Personal mentoring support from a senior Imperial academic
- The chance to take full responsibility for setting and directing your own research agenda
Royal Society URF (University Research Fellowship)
https://royalsociety.org/grants-schemes-awards/grants/university-research/
- 80% of the basic salary costs up to £39,389.64 in the first year, estates costs and indirect costs
- Research expenses (up to £13,000 for the first year and up to £11,000 annually thereafter)
RAEng Research Fellowship
http://www.raeng.org.uk/grants-and-prizes/support-for-research/raeng-research-fellowship
- Freedom to concentrate on basic research in any field of engineering
- The services of a mentor to offer advice and to facilitate the formation of industrial links
EPSRC Fellowships
https://www.epsrc.ac.uk/skills/fellows/areas/priorityareas/ict/roboticsandautonomoussystems/
- EPSRC has defined three career stages (postdoctoral, early and established career) and the attributes expected at each stage.
- Applications can be submitted at any time and will be processed on a rolling basis at a review panel.
Newton International Fellowships
https://royalsociety.org/grants-schemes-awards/grants/newton-international/
- This scheme is for non-UK scientists who are at an early stage of their research career and wish to conduct research in the UK.
- Eligibility requirements: to have a PhD, no more than 7 years of full-time postdoctoral experience, work outside the UK, and not hold UK citizenship
UROP position at Imperial College London for 2016
![]() If you are a full time undergraduate student at Imperial College London you are invited to apply to the Undergraduate Research Opportunities Programme (UROP).
If you are a full time undergraduate student at Imperial College London you are invited to apply to the Undergraduate Research Opportunities Programme (UROP).
The available UROP projects are advertised by the corresponding supervisors here:
http://www.imperial.ac.uk/urop/how-to-get-involved/academic-entries-adverts/engineering/
Funding
Students can apply to receive a bursary (funding) for the duration of their UROP project. The bursary will provide the student with a contribution towards their living costs for 6-12 weeks while undertaking a research experience within Imperial College during the summer of 2016.
More information:
http://www.imperial.ac.uk/students/fees-and-funding/undergraduate-funding/loans-and-grants/funding-for-placements/urop/
Deadline
The deadline to submit an application for funding is 14 March 2016.
Supervision
I am available to supervise undergraduate students for a UROP project on topics related to robotics and machine learning. Interested applicants should contact me by e-mail [p.kormushev (at) imperial.ac.uk].
UROP project description (tentative)
Title: Robotics and Machine Learning UROP
Description: Depending on the skills and interests of the student, this UROP project could include designing a new robot, creating it using 3D printing, and controlling it. The main focus is on novelty – coming up with a novel robot design, or novel robot controller, or novel way to manufacture a robot, such as a robot arm or a mobile robot. In terms of software, the focus is on applying Machine Learning methods for the flexible control of a robot, and to allow the robot to learn new skills from experience. The topic is quite flexible and will be defined in collaboration with the student.
Requirements: Basic knowledge of robotics, software programming skills, creativity.
How to apply
The scheme is now open for applications. Instructions for application:
http://www.imperial.ac.uk/urop/how-to-get-involved/how-to-apply/
TOPICS
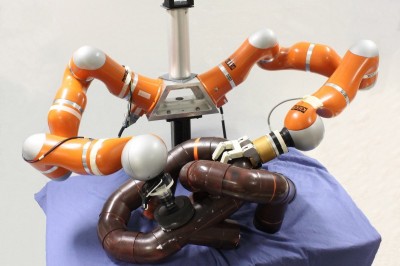
WALK-MAN robot
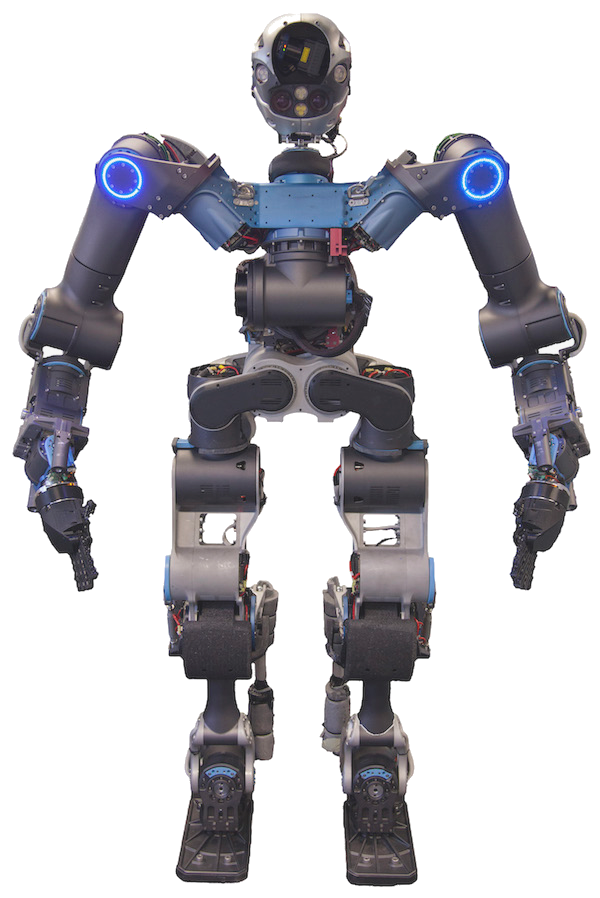
WALK-MAN is a humanoid robot developed by the Italian Institute of Technology and University of Pisa in Italy, within the European funded project WALK-MAN (www.walk-man.eu). The project is a four-year research programme which started in October 2013 and aims to developing a humanoid robot for disaster response operations.
WALK-MAN is the acronym of “Whole Body Adaptive Locomotion and Manipulation” underlining its main research goal: enhancing the capabilities of existing humanoid robots, permitting them to operate in emergency situations, while assisting or replacing humans in civil damaged sites including buildings, such as factories, offices and houses. In such scenarios, the Walk-man robot will demonstrate human type locomotion, balance and manipulation capabilities. To reach these targets, Walk-man design principles and implementation relied on the use of high performance actuation systems, compliant body and soft under actuated hand designs taking advantage of the recent developments in mechanical design, actuation and materials.
The first prototype of the WALK-MAN robot will participate in the DARPA Robotics Challenge finals in June 2015, but it will be further developed both in hardware and software, in order to validate the project results through realistic scenarios, consulting also civil defense bodies. The technologies developed within Walk-man project have also a wide range of other applications, including industrial manufacturing, co-worker robots, inspection and maintenance robots in dangerous workspaces, and may be provided to others on request.
Technical details
The prototype WALK-MAN platform is an adult size humanoid with a height of 1.85m an arm span of 2m and a weight of 118Kg. The robot is a fully power autonomous, electrically powered by a 2KWh battery unit; its body has 33 degrees of freedom (DOF) actuated by high power electric motors and all equipped with intrinsic elasticity that gives to the robot superior physical interaction capabilities.
The robot perception system includes torque sensing, end effector F/T sensors, and a head module equipped with a stereo vision system and a rotating 3D laser scanner, the posture of which is controlled by a 2DOF neck chain. Extra RGB-D and colour cameras mounted at fixed orientations provide additional coverage of the locomotion and manipulation space. IMU sensors at the head and the pelvis area provide the necessary inertial/orientation sensing of the body and the head frames. Protective soft covers mounted along the body will permit the robot to withstand impacts including those occurred during falling incidents. The software interface of the robot is based on YARP (www.yarp.it) and ROS (www.ros.org).
The WALK-MAN team information is available on the DARPA DRC website:
http://www.theroboticschallenge.org/finalist/walk-man
![]()